ACCUEIL NXI GESTATIO

SCUTIGERA
Observatoires de l'inaccessible [Pendant ce temps...] • Étude No 1
État actuel : études techniques en cours en environnement contrôlé l’aide de maquettes fonctionnelles partielle pour les matériaux de structure, les systèmes de stabilisation et le contrôle autonome. Collaboration INIT Robots / ÉTS Montréal.
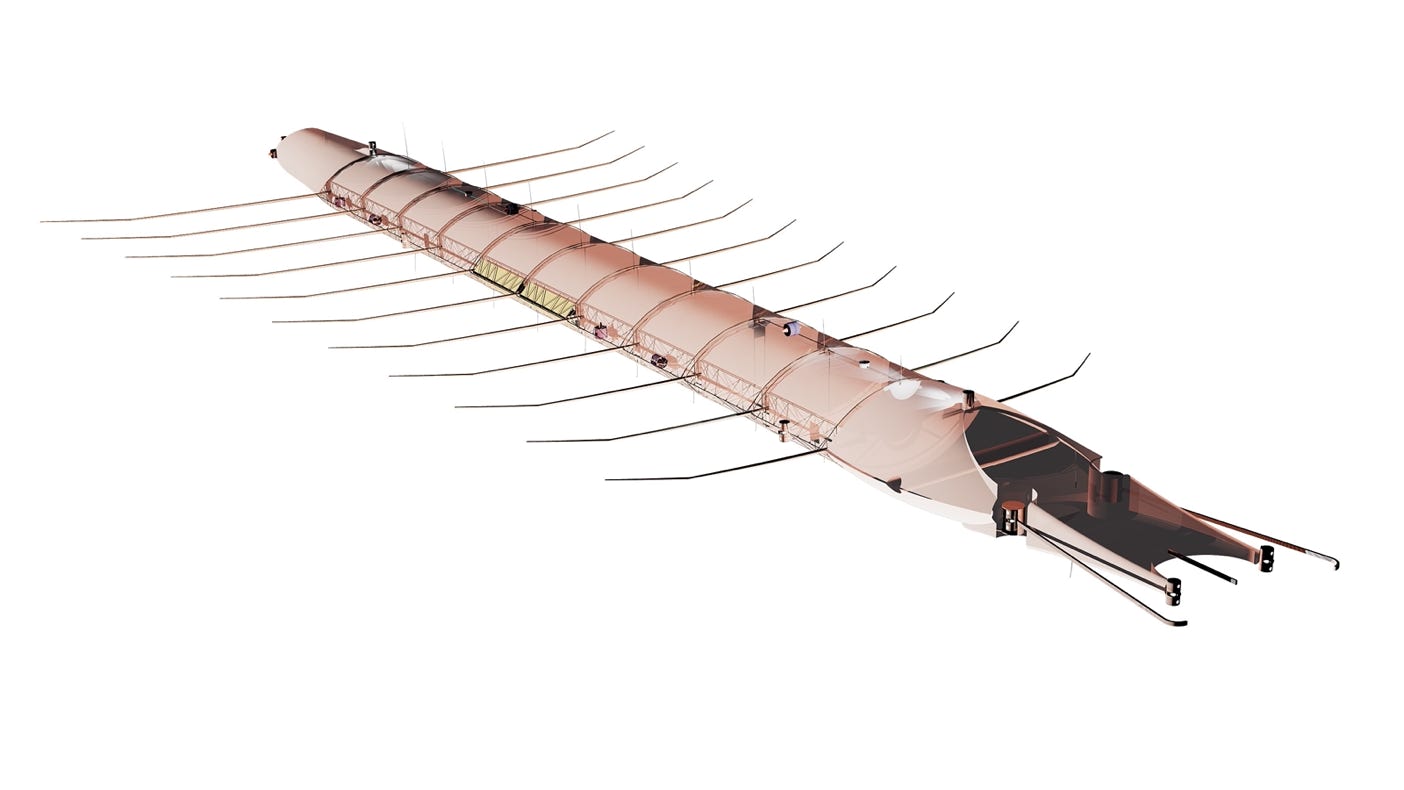
Fig. 1 • Scutigera, un automate volant modulaire pour l'exploration de l'inaccessible envisagée comme performance artistique. Ses équipements et ses senseurs devront lui permettre de naviguer hors de vue de façon autonome dans des espaces ou des conduits intérieurs, naturels ou construits, inaccessibles à l'homme.
1 - UN CONCEPT BIOMORPHIQUE
Scutigera, ou la Scutigère, est un automate volant, intelligent et interactif prévu pour des installations et des performances dans de vastes espaces intérieurs : salles ou galeries souterraines naturelles, sites archéologiques, vestiges industriels, anciens espaces architecturaux… Cet aérostabile, hybride sophistiqué et biomorphique de drone et de dirigeable, devra trouver sa route sans assistance humaine, même dans des espaces situés hors de vue et inaccessibles, pour retransmettre en temps réel les images, les films, les sons et les données captés durant ses vols.
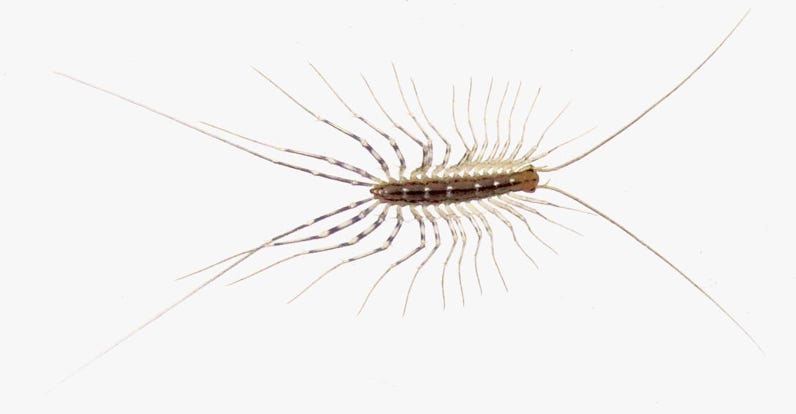
Fig. 2 • Scutigère Véloce (Scutigera Coleoptrata), ainsi nommée à cause de sa rapidité de déplacement (40 cm/s). Le corps plat et segmenté de cet arthropode lui permet de s'infiltrer dans les espaces les plus restreints. Les antennes (vibrisses) sont de puissants outils de localisation. Chaque segment porte une paire de patte. Son corps est protégé par des plaques tergales, sortes de boucliers de chitine auxquels elle doit son nom (scutigera = porteuse de boucliers). Plusieurs aspects de la scutigère inspirent le design de l'aérostabile Scutigera.
Scutigera tire son nom d’un arthropode commun dans les maisons, la scutigère véloce ( scutigera coleoptrata ), une variété de mille-pattes très plat et très rapide, aux pattes très longues (Fig. 2), que l’on retrouve dans les lieux les plus inattendus, entre les pages d’un livre ou sous une boîte posée au sol. Inspiré par celui de l’arthropode, son design se compose de segments arrimés les uns aux autres de façon semi-rigide, dédiés chacun à une fonction spécifique. Le segment avant comporte une tête équipée de diodes lumineuses de grande puissance et de caméras. Les autres sont dédiés à l’alimentation électrique (batteries), à la propulsion (micro-turbines), à la prise de vue (caméras), à l’éclairage (diodes), à la détection du contexte (sonars, centrale inertielle, altimètre, sondes de onctact…), à la transmission de signaux (antennes de réception/diffusion), au contrôle (ordinateur embarqué), à la stabilisation et à l’équilibrage. L’ensemble évoque une scutigère volante de plusieurs mètres de long. Comme celle de sa contrepartie animale, sa morphologie est relativement aplatie, un choix adopté pour des raisons de stabilité; les segments sont orientés horizontalement, mais peuvent pivoter selon l’axe longitudinal de l’automate pour se placer en position verticale de façon à franchir un passage étroit (voir fig. 5). Elle peut indifféremment rester suspendue dans l'espace ou se déplacer selon les trois axes.
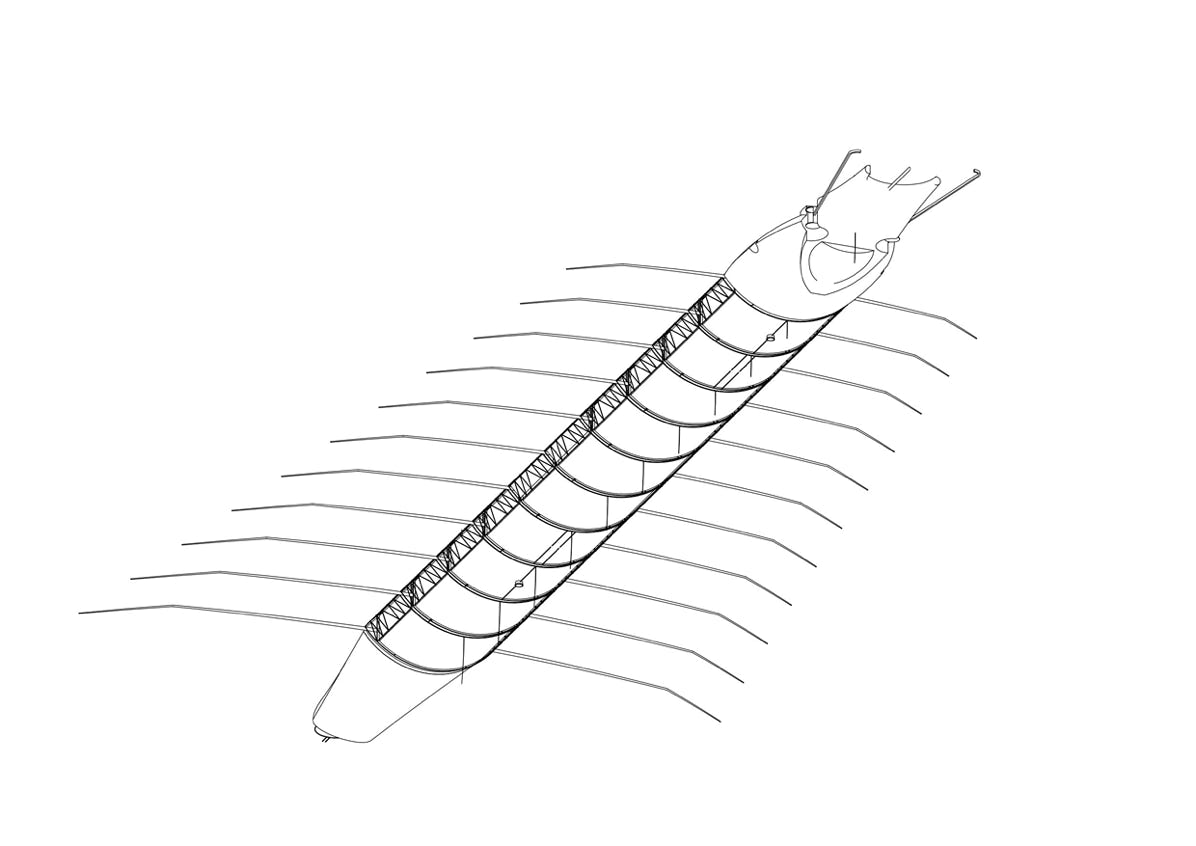
Fig. 3 • Esquisse préliminaire de l'automate Scutigera, montrant le corps segmenté et les vibrisses. Les différentes composantes sont décrites en fig. 6.
Bien qu’autonome dans ses déplacements, Scutigera est munie de dispositifs de sécurité pour le vol sans visibilité qui sont constamment surveillés par les pilotes au sol. Chaque segment est équipé de vibrisses, longues antennes de contact lui permettant de détecter l’approche des parois, d’en déterminer la nature et de prévenir tout risque d’échouement. Elle possède, en plus de ses caméras de prises de vue, des caméras par lesquelles elle s’observe elle-même, permettant aux pilotes de connaître l’environnement de vol et d’intervenir en cas de situation imprévisible comportant des risques de blocage ou de dommage (courant d’air violent et subit, chutes d’eau tombant des parties hautes d’une caverne, condensation instantanée de l’humidité ambiante…). Les informations recueillies durant chaque vol permettent à la Scutigère de construire sa propre carte 3D de l’environnement qu’elle parcourt, de façon à optimiser les vols suivants.
La Scutigère pourra fonctionner selon deux modes. En mode « installation », elle restera immobile, suspendue dans l’espace, ses diodes faiblement allumées, ondulant selon un rythme contemplatif qui évoquera une respiration. L’arrivée de visiteurs sur le site déclenchera un lent mouvement de translation par lequel elle s’approchera d’eux, manifestant par ses mouvements propres, par ceux de ses composantes, par ses déplacements et par les variations d’intensité de ses diodes sa volonté d’établir une interaction avec eux. En mode « performance », elle partira en mission vers des zones inaccessibles et/ou hors de portée de vue, s’aventurant par exemple dans des tunnels inexplorés, pour en retransmettre en direct les images et les sons à l’intention de l’audience, qui se trouvera à découvrir avec elle ces lieux que personne n’a jamais vus.
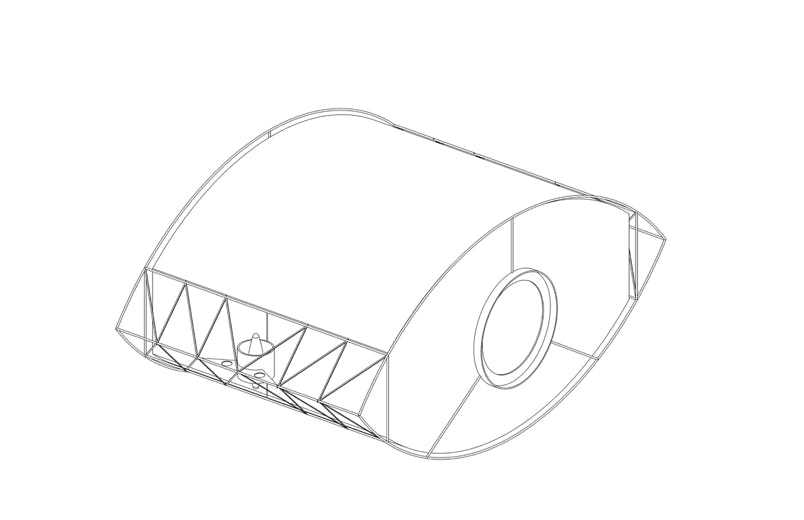
Fig. 4 • Un segment de Scutigera. Une enceinte en uréthane emplie d'hélium est tendue sur un exosquelette en fibre de carbone. Chaque segment est dédié à une fonction précise. Celui-ci comporte deux turbines verticales, assurant le déplacement selon l'axe Z. Les attaches rotatives entre les segments permettent de les faire pivoter les uns par rapport aux autres. Chaque segment est dédié à une fonction spécifique. Le nombre de segments est déterminé avant l'envol, selon le voyage prévu.
ASPECTS TECHNOLOGIQUES
Technologiquement, chaque segment de Scutigera est un dirigeable semi-rigide. Il se compose d’une enceinte d’uréthane emplie d’hélium tendue sur un exosquelette en fibre de carbone, sur lequel sont fixées les composantes mécatroniques (micro-turbines, antennes, ordinateurs…) ainsi que les senseurs (caméras, micros, altimètres, sonars….) et les batteries. Les principes structuraux qui sous-tendent cette technologie ont été explorés depuis plusieurs années au sein de mon laboratoire (voir projets Mascarillon, SAILS et Aérostabiles dans le folio joint à cette demande), qui possède de ce fait une expertise unique dans la conception et le contrôle des aérostats semi-rigides. Nous avons en particulier mis au point des aérostabiles cubiques volants autonomes et interactifs, les "Tryphons", qui ont été utilisés à maintes reprises dans le cadre de performances interactives et d'expérimentations en recherche-création (voir fig. 7).
Lorsqu’ils sont vides, les segments de Scutigera présentent une forme aplatie qui en favorise le transport et le stockage. Une fois gonflés, ils se présentent comme des prismes à section en forme d’amande, assemblés par leurs faces planes au moyen d’amarres rotatives qui leur permettent de pivoter les uns par rapport aux autres (voir fig. 3 et 4). Les vibrisses sont également amovibles, de façon encore une fois à faciliter le transport.
Tous les équipements électroniques sont tropicalisés, soit par des vernis spéciaux, soit par inclusion dans des blocs de résine, afin d’assurer un fonctionnement correct dans l’environnement particulier des salles souterraines (basses températures, humidité élevée, poussières, cascadelles…). Les exosquelettes, dont la configuration finale sera déterminée par une analyse informatique par éléments finis, feront largement appel au prototypage rapide (imprimante 3D) de précision, ainsi qu’à l’assemblage de matériaux composites, et à l’expertise au niveau des adhésifs spécifiques à ces matériaux. Grâce à notre longue expérience de telles structures, toutes ces technologies sont également très bien maîtrisées par l’équipe de mon laboratoire.
La technologie de l'aérostabile est la seule qui puisse être utilisée dans des environnements aussi difficiles que ceux des cavernes, ou ceux d'environnements construits équivalents. Leur autonomie (plusieurs heures) et leur robustesse sont très largement supérieures à celles des drones. Du fait que la portance est générée par l'hélium, ils ne dépensent pratiquement pas d'énergie pour se soutenir en l'air et peuvent rester très longtemps immobiles pour capter des images ou des données. Cet aspect est également fondamental pour le vol sans visibilité, durant lequel les déplacements doivent pouvoir être très lents; il n'existe pas pour le moment de drones capables de voler sécuritairement hors de vue. Par rapport à un dirigeable ou à une montgolfière, l'aérostabile est beaucoup plus maniable. Il se déplace indiféremment selon les trois axes sans avoir à pivoter sur lui-même; sa construction semi-rigide permet d'installer des caméras, ou tout autre équipement, n'importe où à sa surface.
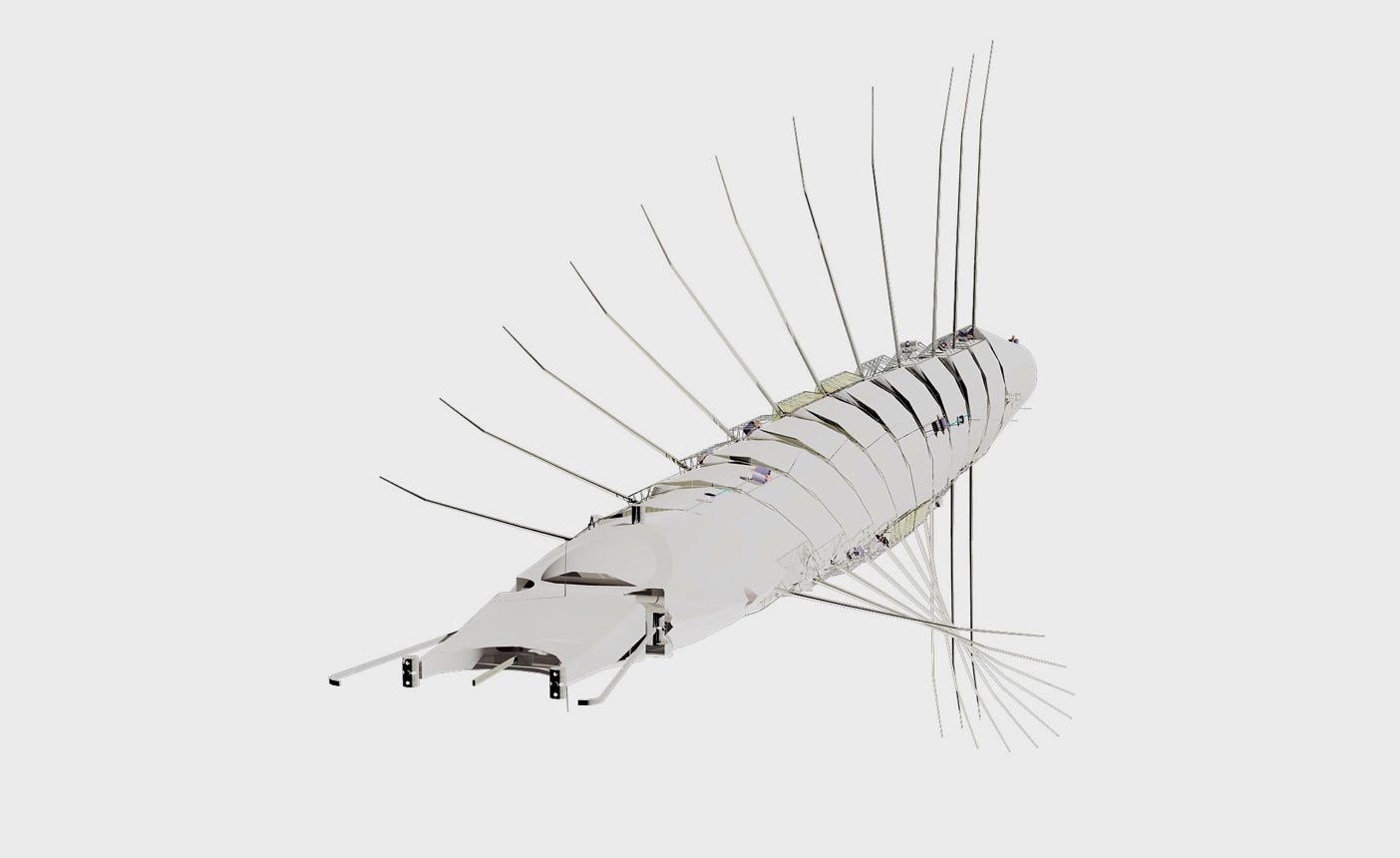
Fig. 5 • Scutigera en vol. Les segments peuvent pivoter les uns par rapport aux autres pour permettre à l'automate de négocier des passages plus étroits. Sur l'image, les segments arrière sont tournés de 90 degrés par rapport aux segments avant.
ÉQUIPE DE PROJET
L’expertise robotique au niveau du design de systèmes mécaniques sera apportée par l’équipe de la professeure Inna Sharf, de l'Aerospace Mechatronics Laboratory, faculté d'ingénierie, Université McGill. La professeure Sharf travaille depuis quatre ans sur les aérostabiles, en particulier au niveau des problèmes liés à la structure, au contrôle et au "docking" (amarrage en vol de deux aérostabiles). Deux de ses étudiants ont travaillé sur les aérostabiles de type "Tryphon" (voir Fig. 7) dans le cadre de leur projet de maîtrise. Elle prévoit faire travailler au moins deux étudiants sur le projet de la Scutigère.
L'expertise au niveau du positionnement, de la localisation et des vibrisses sera apportée par le professeur Philippe Giguère, du département de robotique de l'Université Laval, dont le laboratoire travaille également sur les aérostabiles depuis quatre ans; ses étudiants ont également développé plusieurs modules actuellement utilisés dans le cadre des expérimentations et des performances avec les "Tryphons". Le professeur Giguère a déjà travaillé plusieurs années sur le développement de vibrisses de contact, dont la techologie sera adaptée pour la conception des vibrisses de la Scutigère. Il prévoir faire travailler au moins deux étudiants sur le présent projet.
David St-Onge, ingénieur et partenaire de mon laboratoire depuis dix ans, complète actuellement sous la direction du professeur Clément Gosselin (robotique, U. Laval) un doctorat sur les automates volants déformables. Il amorcera prochainement un post-doc sur le thème apparenté des structures déployables en environnement sans gravité. Il travaillera sur le design de structure et sur la coordination technologique générale. Au sein de mon laboratoire, David a travaillé en collaboration étroite avec moi-même sur tous les aspects des aérostabiles, de la conception de structure à la mécatronique et à la programmation des procédures de contrôle en passant par l’analyse des expressions et des émotions induites par le comportement des organismes robotiques.
Le regroupement en une même équipe de ces expertises de très haut niveau est de nature à garantir la bonne marche de ce projet, malgré les importants défis qu’il présente.
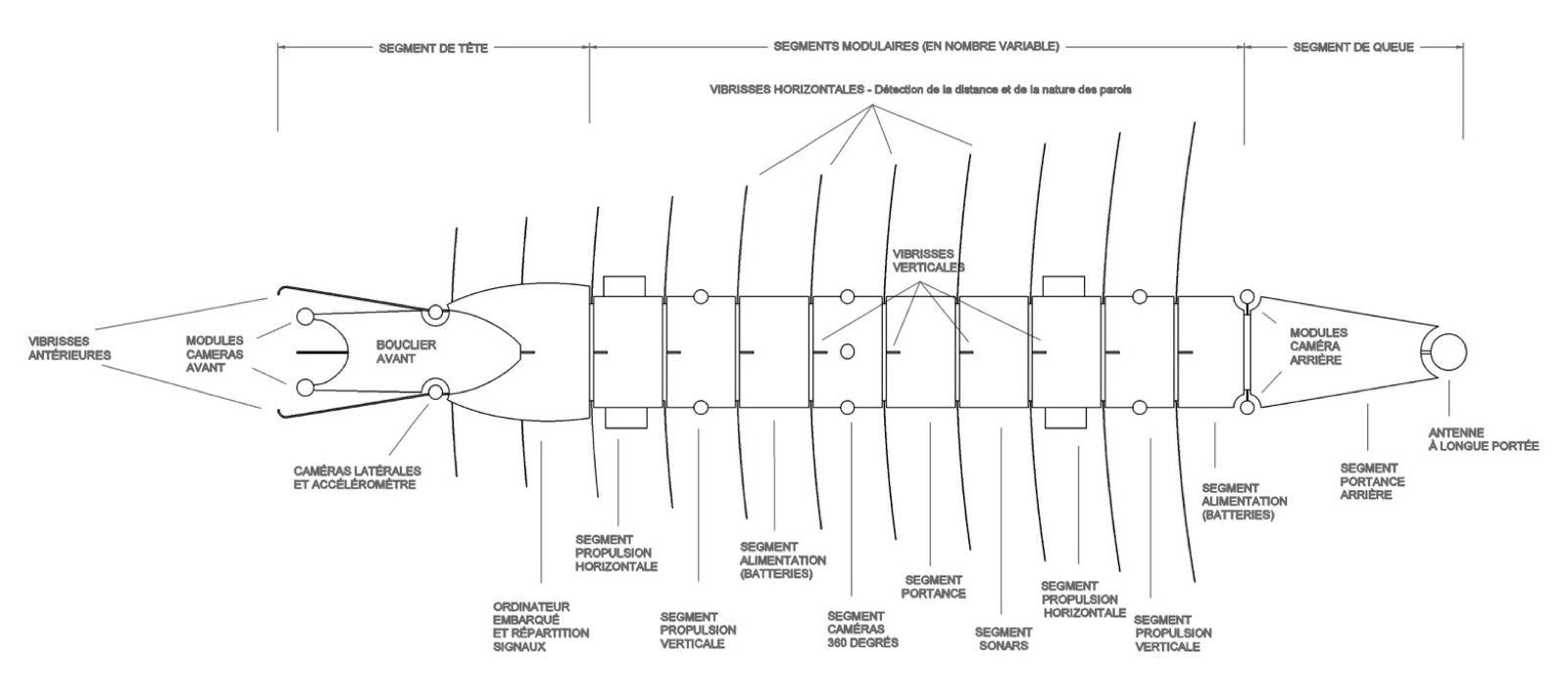
Fig. 6 • Diagramme en plan de Scutigera. Le segment de tête comprend des caméras, des senseurs et des équipements de protection. Les vibrisses antérieures mobiles surveillent la présence d'obstacles sur l'avant. Le bouclier avant détecte les gouttes d'eau et les cascadelles tombant des voûtes (petites chutes d'eau à l'intérieur des grottes), ainsi que les chutes de grains de sable ou de petits débris. Il protège les équipements les plus sensibles et force l'arrêt ou le recul de la Scutigère si les conditions deviennent trop difficiles. Chaque module caméra possède ses propres diodes de puissance qui éclairent son champ de vision. Les vibrisses horizontales détectent le diamétre des conduits traversés par l'aérostabile. Elles sont très flexibles et se replient sans difficulté si ce dernier devient plus étroit. La rotation de certains segments permet aux vibrisses d'agir comme éléments profileurs : elles peuvent tourner sous tous les angles, et ainsi déterminer le profil du passage. Certains segments (portance) ne portent rien en tant que tel, mais permettent aux segments voisins de porter des équipements plus lourds. L'antenne arrière à longue portée transmet ses signaux à la base au sol, utilisant éventuellement des balises-relais flottantes (voir fig. 7). La disposition des moteurs permet à la Scutigère de se déplacer selon les trois axes sans avoir à tourner sur elle-même : elle se déplace indifféremment d'avant en arrière, de gauche à droite et de haut en bas.
CADRE DU PROJET ET ÉTUDE PROTOTYPE
L'équipe de recherche-création du laboratoire NXI Gestatio (école de design de l’UQAM), que je dirige, travaille depuis plusieurs années sur la mise au point d’automates cubiques volants capables, grâce à des senseurs de différents types, d’interagir avec leur environnement, avec leurs congénères robotiques et avec les êtres humains. L’interaction avec ces derniers se fait par le mouvement, le déplacement et par la voix chantée – de courtes mélodies qui provoquent des déplacements, des rotations et des changements d’état de l’aérostabile. Les études les plus récentes ont conduit à un cube volant capable de développer par interaction directe des chorégraphies hybrides avec des performeurs. Une performance comprenant deux aérostabiles, deux danseuses et deux capoeiristes a ainsi été présentée à l’ouverture du festival Chromatic 2014 au Chalet de la Montagne à Montréal (voir folio joint à cette demande).
La toute dernière étude (juillet 2015 : un Aérostabile dans La Verna), une étude prototype pour la présente demande, a consisté à emmener un cube volant dans une immense salle souterraine du sud de la France pour y présenter des performances publiques. Le projet artistique original consistait à faire évoluer l’automate sous les vastes voûtes de pierre, afin de magnifier le contraste entre l’aspect hautement technologique de l’objet et les strates rocheuses primordiales vieilles de plusieurs centaines de millions d’années. Ses dimensions apparentes lors de ses déplacements devaient donner aux visiteurs une échelle leur permettant de réaliser l’ampleur des dimensions de la caverne, autrement très difficiles à saisir. Par ses mouvements lents et contemplatifs, il devait évoquer un être cavernicole, larvaire et luminescent, une forme de vie insolite évoluant dans l’obscurité de temps géologiques. Toutefois, les premières discussions avec les spéléologues responsables de la caverne ont rapidement conduit à l’idée d’équiper le Tryphon de caméras et de diodes lumineuses très puissantes pour associer au projet artistique original une composante spéléologique, qui est vite apparue comme une véritable première : la technologie unique de l’aérostabile en fait le seul véhicule actuellement susceptible d’aller filmer les parties hautes de telles cavernes, et d’explorer des conduits (« lucarnes ») débouchant au sommet des voûtes, des zones jamais visitées et inaccessibles à toute exploration humaine directe.
Prévu pour l’environnement contrôlé des centres d’exposition et des galeries d’art, l’aérostabile a dû être longuement préparé pour supporter les conditions régnant à l’intérieur de la grotte : température de six degrés ; humidité de plus de 80% ; condensations subites de la vapeur d’eau ambiante provoquant l’apparition de grosses goutelettes sur toutes les surfaces; régimes aériens imprévisibles et potentiellement dangereux pour un aérostat. Non seulement, après quelques incidents mineurs, avons-nous réussi à obtenir une performance plus que satisfaisante de l’objet, mais nous avons également ramené des images de lieux qui n’avaient jamais été observés, dans la ligne directe du programme des Observatoires. À l’intention artistique de départ s’est ainsi rajoutée une composante scientifique, en une illustration parfaite de synergies rendues possibles par la recherche-création : une association intime des modes de créativité artistique, scientifique et technologique, dans lesquels chacun se positionne à parts égales, et qui ouvre de nouvelles pistes de recherche dans chacun des trois domaines. Ici, l’exploration spéléologique devient une composante de l’installation artistique : elle détermine une forme de narration à la Jules Vernes (auteur mentionné par plusieurs des journalistes qui ont assisté aux performances), par une expédition qui, au-delà de son intérêt scientifique, possède sa propre poésie – l’imaginaire du voyage, le vertige de l’inconnu, et notre fascination pour ces premières incursions dans des mondes encore jamais visités.

Fig. 7 • Un "Tryphon", aérostabile cubique de 2,25m de côté en vol dans la très grande salle souterraine de La Verna (Pyrénées françaises). Les expérimentations effectuées en juillet 2015 à l'aide de cet automate volant, lors de performances artistiques, ont permis d'obtenir des images de régions de la grotte qui n'avaient jamais été observées jusqu'alors. Les résultats de cet événement ont conduit à l'idée d'un aérostabile adapté aux conditions spécifiques d'espaces et de conduits intérieurs de grandes dimensions, au cœur du projet Scutigera de recherche-création. Des "Tryphons" modifiés pourront être utilisés comme balises-relais flottantes pour assurer la transmission des signaux dans les cas où la distance ou la configuration des lieux deviennent problématiques.
Le projet Scutigera prend appui sur ces résultats inattendus et extrêmement prometteurs pour confirmer la faisabilité d’un véhicule adapté à l’exploration de lieux et de conduits inaccessibles et sans visibilité. Plusierus types d'environnement sont considérés. Parmi les très grandes salles souterraines, après la grotte de La Verna, la Mammoth Cave, dans le Kentucky, ainsi que la gigantesque grotte de Hang Song Doon, au Vietnam, seront les premières candidates. La Scutigère pourra également, avec des ajustements appropriés, s'introduire dans des sites inaccessibles pour des raisons de toxicité ou de radiations (Enceinte des réacteurs de Fukuchima, New Mexico Nuclear Waste Facility...), explorer les parties hautes ou bloquées de structures partiellement détruites (sites archéologiques, anciens sites industriels), d'anciens tunnels miniers ou des grands canaux collecteurs d'égoûts alors qu'ils sont en fonction... Le nombre des segments et la nature des équipements embarqués dépendront à chaque fois de l'exploration envisagée.
Le projet se voit d’emblée associé à des expertises technologiques et scientifiques avancées, par la participation de chercheurs, de spéléologues et d’ingénieurs qui, tout en poursuivant leurs propres intérêts de recherche, travailleront à l’atteinte des objectifs artistiques spécifiques à la recherche-création en cours. En plus de maximiser les chances de succès du projet, leur participation s’accompagne d’un apport de ressources financières et humaines sans lesquelles l’atteinte de ces objectifs pourrait se révéler nettement plus difficile.
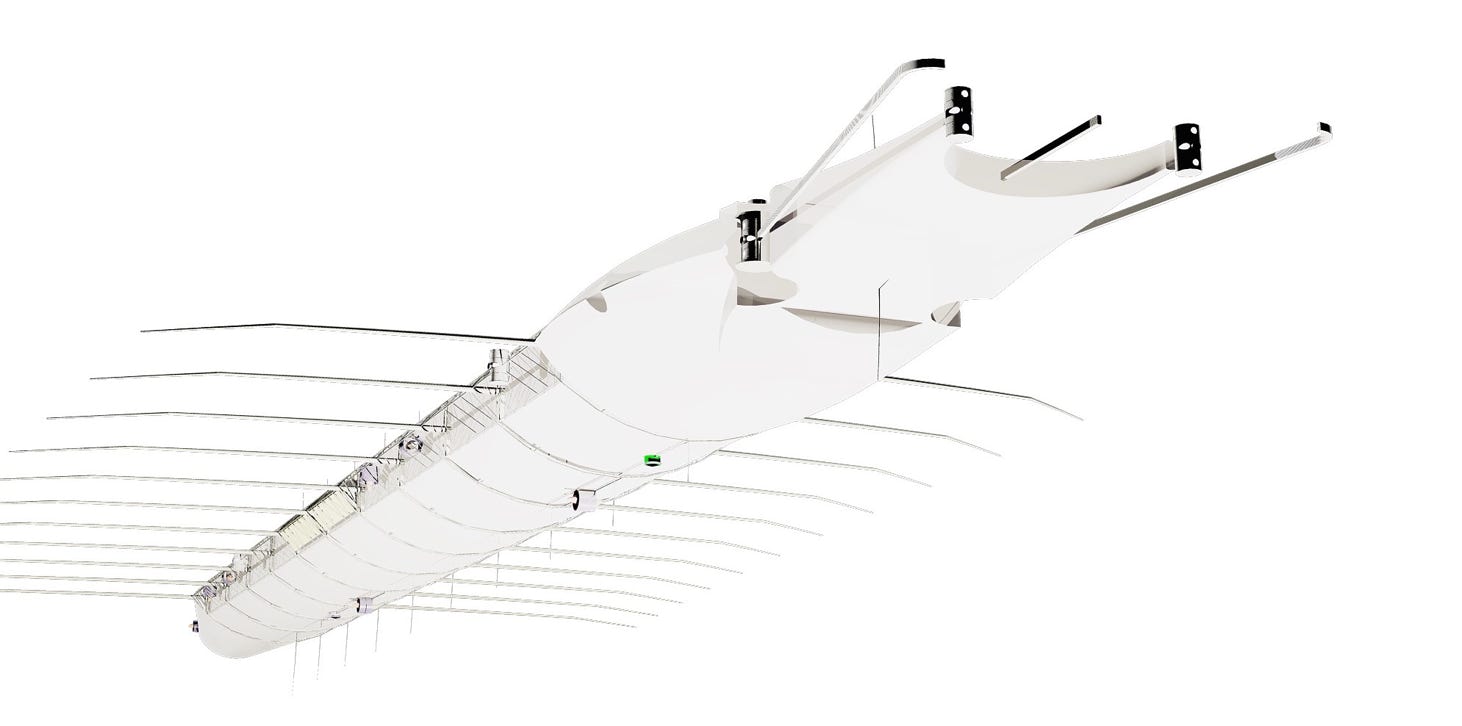
Fig. 8 • Scutigera en vol. Les "têtes caméras"' avant et latérales sont clairement visibles, sous la forme de petits cylindres comportant chacune une caméra et quatre diodes lumineuses très puissantes. Leur montage est l'équivalent d'un "pan-tilt" : elles peuvent s'orienter dans toutes les directions.